基于最小割算法的点云分割
计算机图形学课两个课题之一,我的第一个选题其实就已经把第二次选题(图形分割)做完了,老师问我,那你还用第一次选题的RANSAC算法吧,结果脑子一热装了把逼“不不,我做最小割算法分割吧,学习新知识嘛”。
1.与其他分割算法的不同:
目标:不是将点云分成多个部分,而是将前景对象从背景点中分离出来
特点:
- 不关心细粒度特征例如曲率,而是只依赖点间距和点密度来分割。
- 非数据驱动的。某些算法使用特定对象实例的集合去分割新的点云中的特定对象,即数据驱动。
2.算法的直觉出发点:
一个好的分割应该包含相互连通性很好的点,而与背景点的连通性则很差。
3.最小割点云分割的算法步骤
(1)将点云构造k-临近图(KNN)。k如何取值?k越大,计算复杂度越高,精度越高
(2)根据点与点之间的距离给边赋予距离权重
权重 wi=expr(-(di/o)),即
![]()
o为点距标准差,dist(di)为点距
为何使用该公式?使用正态分布来分配距离权重
(3).用户输入对象预期参数应用于损失函数。参数包括预期的对象的中心坐标(X,Y)和范围Radius,则
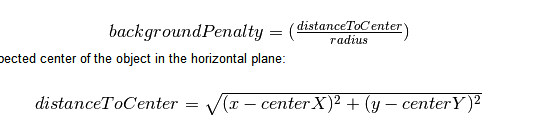
(4).对图执行Min-Cut分割,分割出前景点(Foreground Point)和背景点(Background Point)。
4.PCL实现
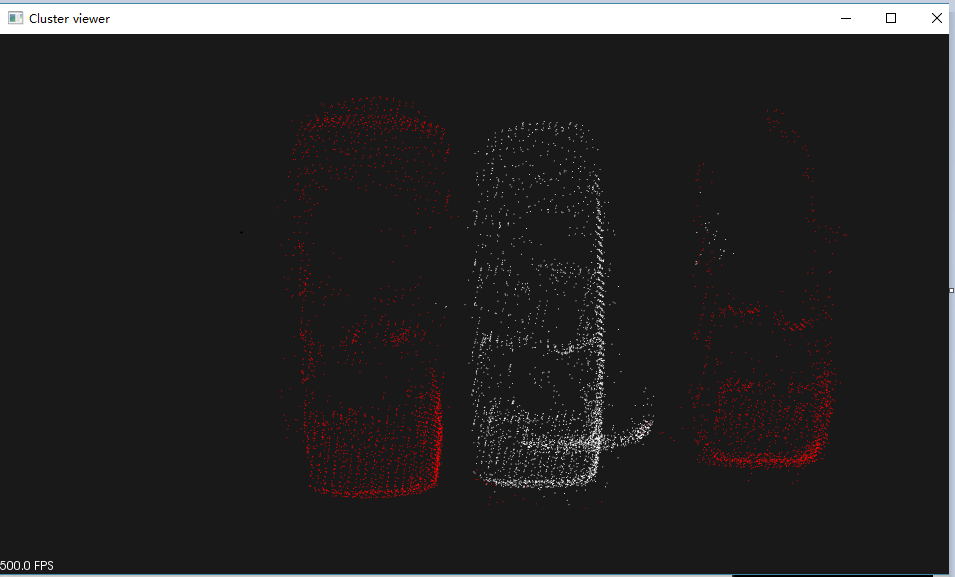
5.执行结果展示
KNN k=20时的分割结果
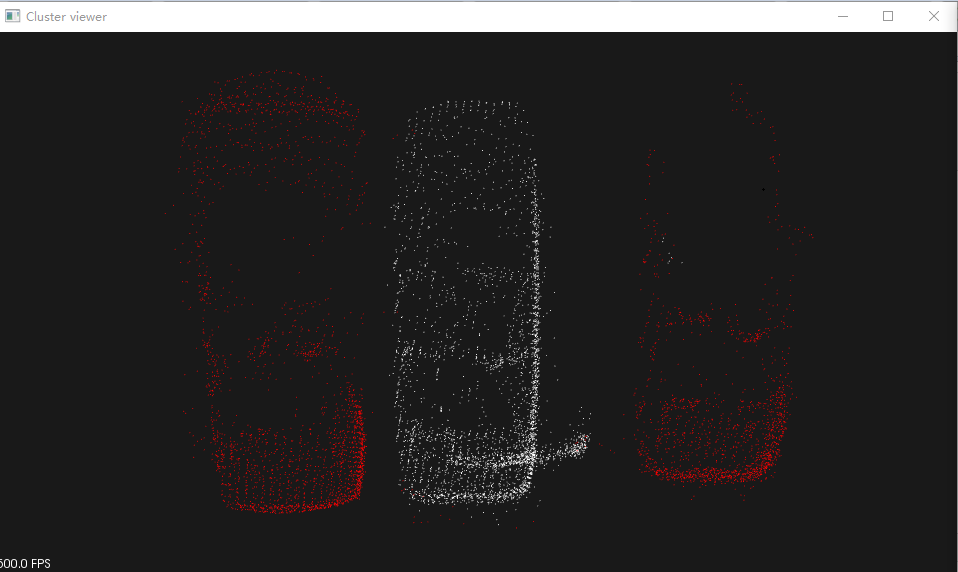
k=14时
共有 0 条评论